
Evolución de las herramientas de cosecha
Evolución de las herramientas de cosecha

Desde la antigüedad, hasta la revolución industrial, el trabajo de cosecha es manual. Existen excepciones en la mecanización de la cosecha, como el vallus romano (sin impacto posterior), pero el gran salto tecnológico lo impulsa la revolución industrial. Desde el siglo XVIII, la mecanización comienza a aplicarse en el trabajo del campo mediante máquinas de tracción animal, y el proceso culmina con la llegada de la máquina de vapor y los motores de combustión interna.
Este repaso a la historia de la tecnología y las herramientas resulta genérico por falta de espacio, pues cada parte del mundo, y cada cultivo, tiene su propia evolución. En Hispanoamérica, por ejemplo, el machete se emplea con preferencia a la hoz, mientras que cultivos, como el algodón, se cosechan con desmotadoras, una maquinaria específica.
Cosecha manual con hoz y guadaña
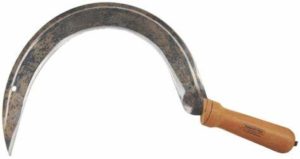
La hoz es una herramienta para la siega de origen neolítico. Desde las hoces primitivas, de piedra y hueso, hasta las metálicas actuales, su forma y técnica de uso permanecen básicamente inalteradas. La hoz típica consta de una cuchilla metálica curva, con filo interior, y un mango para dirigirla. El manejo de la hoz puede acompañarse con elementos de protección, como la zoqueta: una pieza de madera en forma de concha que, a modo de guante, protege los dedos de la mano que sostiene la gavilla.
La guadaña es una herramienta de origen medieval. Consta de una cuchilla arqueada de entre 60 y 90 cm y un astil de entre 140 y 160 cm con dos mangos para su manejo. El astil puede ser recto o curvo, según las costumbres de cada región. El uso de la guadaña requiere una técnica que requiere aprendizaje prolongado. Se trata de hacer un equilibrio regular de los dos brazos moviendo la cuchilla horizontalmente con un ritmo oscilatorio particular.
La cosechadora, o segadora-trilladora
La cosechadora es el resultado de la unión en una sola máquina de herramientas para cortar, trillar, clasificar y descargar el cereal. En una máquina cosechadora básica, la zona delantera de la máquina realiza el trabajo de cosecha mediante un molinete que empuja el cultivo hacia la barra de corte. Usando el elevador de correa, la mies cortada se transporta al batidor, en la parte central de la máquina, que actúa como una trilladora.
En la trilladora, con movimientos oscilatorios producidos por pantallas vibratorias y chorros de aire, se produce la separación de la paja y el grano. La paja se expulsa fuera de la máquina y el grano se dirige hacia un depósito.
Evolución de las máquinas cosechadoras
Los historiadores de la tecnología atribuyen al inventor estadounidense Cyrus Hall McCormick (1809-1884) el diseño de la primera cosechadora automática (realmente práctica y que se fabrica a escala industrial). El inventor presenta al público su prototipo en Lexington, Virginia, el 25 de julio de 1831 y lo patenta en 1834.
El prototipo se remolcaba por uno o dos animales de tiro y podía controlarlo un solo operario. La cosechadora ya contiene los elementos de una máquina confiable y fácil de usar: un robusto chasis de metal montado sobre dos ruedas, la principal de las cuales transmite movimiento a los diversos mecanismos mediante engranajes y correas.
La barra de corte consiste en un peine con dientes triangulares que se deslizan adelante y atrás movidos por las ruedas. Un carrete giratorio sostiene los tallos y los dirige hacia la barra de corte, evitando que los tumbe la máquina al pasar. Los tallos cortados caen hacia atrás de manera ordenada, listos para que los trabajadores los aten.
Los ingleses Ongle y Brown inventan un mecanismo de corte similar a principios del siglo XIX, y lo incorporan todas las cosechadoras y segadoras durante los siguientes 150 años.
Los segadores de McCormick son objeto de refinamientos a lo largo de los años. En 1858, los estadounidenses hermanos Marsh desarrollan una segadora con una cinta transportadora que descarga los tallos cortados en una plataforma. Una pareja de operadores, que también transporta la máquina, atan a mano las gavillas.
El siguiente paso, en 1867, son los primeros prototipos de segadoras capaces de atar automáticamente los haces después del corte y la clasificación. En 1874, Marquis L. Gorham diseña una máquina confiable y de buen funcionamiento de este tipo y, unos años más tarde, John F. Appleby refina el prototipo con un mecanismo de anudado simple y efectivo.
Para la década de 1880, el desarrollo de los segadores casi ha terminado. Sin embargo, la evolución de la cosechadora continúa durante décadas, hasta que culminan las mejoras de la trilladora.
Las primeras cosechadoras, o segadoras-trilladoras, aparecen en los Estados Unidos en los años setenta del siglo XIX. Sin la potencia adecuada, requieren tiros hasta 36 caballos o mulas. Su manejo resulta complejo y solo es posible operarlas en terreno plano y de gran extensión.
Las cosechadoras combinadas de arrastre comienzan a fabricarse tras la Primera Guerra Mundial, gracias al advenimiento de los tractores con motor endotérmico. Las primeras cosechadoras autopropulsadas, equipadas con su propio motor, las fabrica Massey-Harris en Norteamérica hacia el final de la Segunda Guerra Mundial. Su uso se extiende de forma gradual por el resto del mundo tras el final del conflicto, hasta hoy.
Las cosechadoras actuales se adaptan a diferentes cultivos mediante el cambio del cabezal y los reglajes mecánicos (velocidad de rotación del molinete, zarandas especiales, etc.). También son capaces de cosechar en terrenos inclinados mediante mecanismos hidráulicos que inclinan el cabezal, o en arrozales, si se configuran con orugas en vez de ruedas.
El presente y el futuro de las cosechadoras

La siguiente revolución, en la que estamos inmersos, la aporta internet y la geolocalización, bases de la maquinaria robotizada que trabaja de forma autónoma. Las cosechadoras autónomas, gracias a los avances de la sensorización y la geolocalización, pueden trabajar en condiciones de baja visibilidad o de noche y generar mapas de rendimiento en tiempo real.
La agricultura inteligente, en la actualidad, sigue dos caminos paralelos: maquinaria inteligente diseñada desde cero para el trabajo autónomo, y elementos tecnológicos que se añaden a la maquinaria para mejorar su operatividad y convertirla en autónoma o semi-autónoma.
La agricultura del siglo XXI se basa en la interconexión de todos los eslabones de la cadena productiva. Cada elemento comparte información entre sí en tiempo real para optimizar al máximo el trabajo a un menor coste: desde la cosechadora, hasta la planta de procesamiento o el distribuidor logístico.
En resumen, la evolución de las herramientas y métodos de cosecha corre paralela a la tecnología de cada época: cada nuevo avance, sin aparente relación con la industria primaria, encuentra con rapidez su aplicación en la agricultura.